Autonomous assembly in robotics and 3D vision presents significant challenges,
particularly in ensuring assembly correctness. Presently,
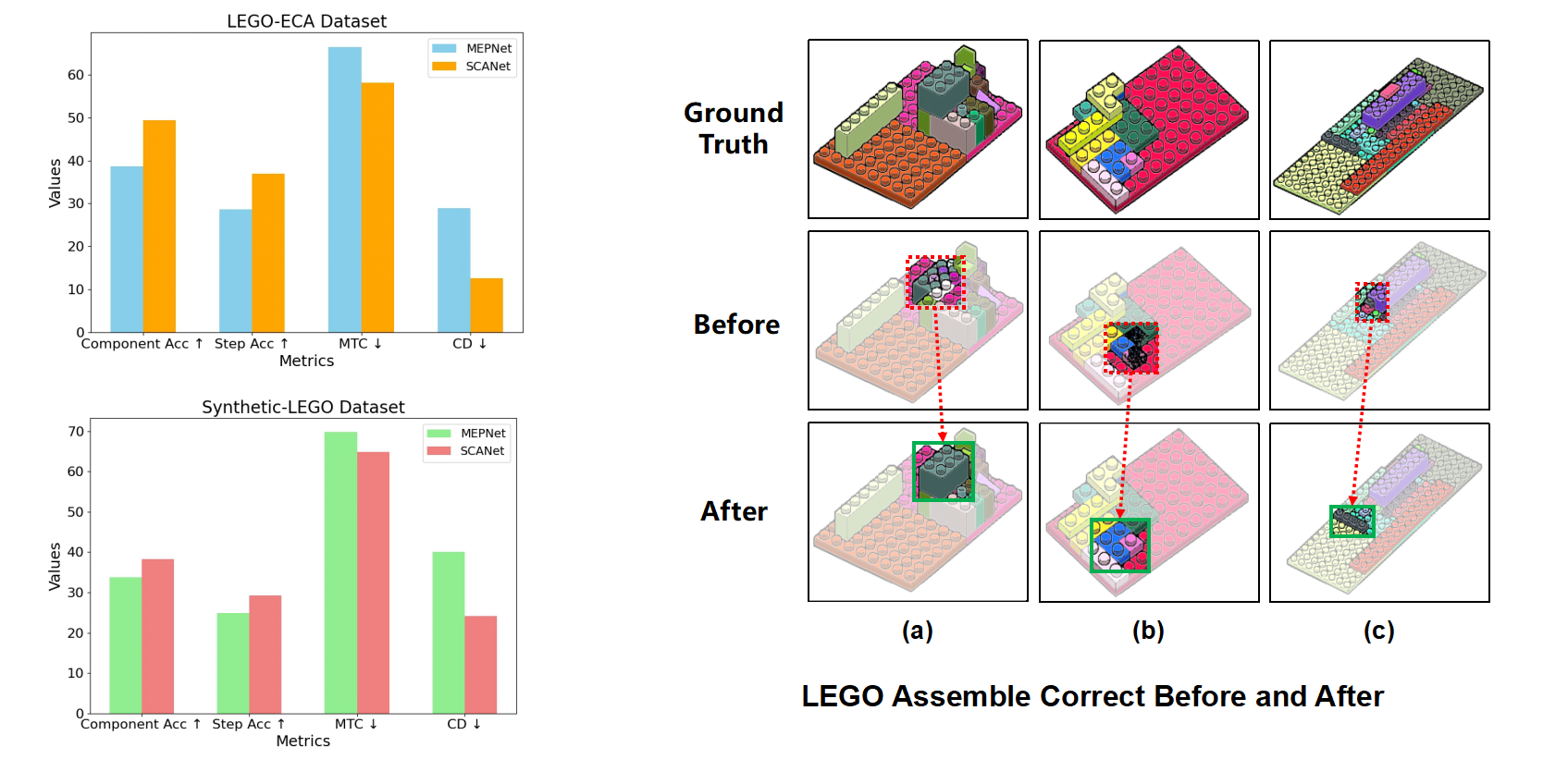
predominant methods such as MEPNet focus on assembling components based on manually provided images.
However, these approaches often fall short in achieving satisfactory results for tasks requiring long-term planning.
Concurrently, we observe that integrating a self correction module can partially alleviate such issues.
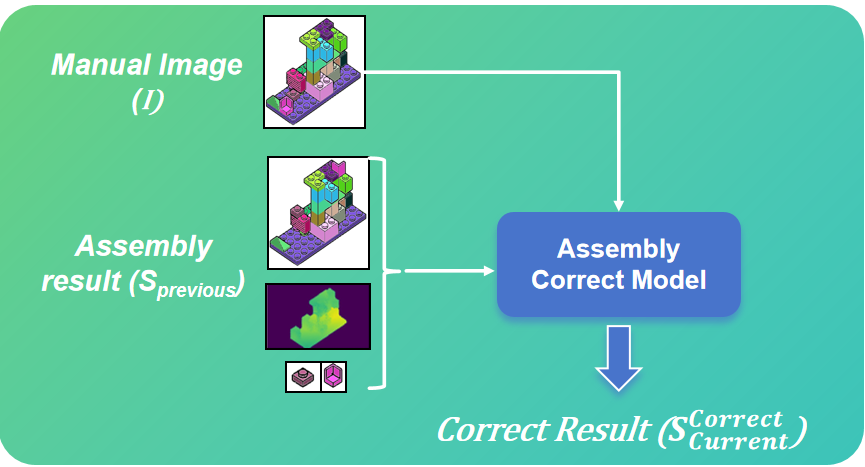
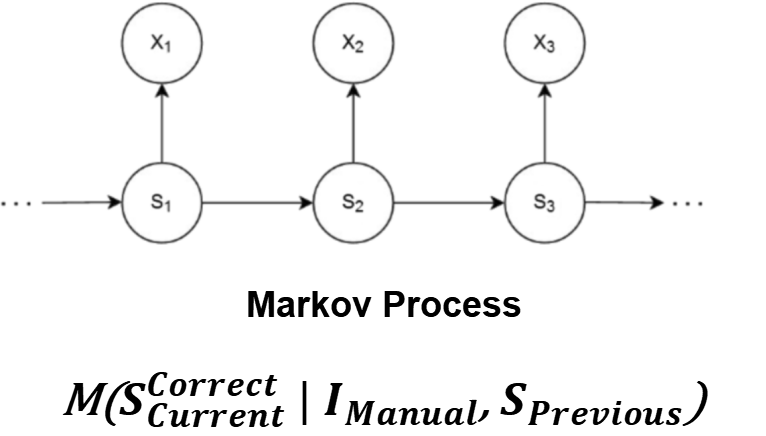
Motivated by this concern, we introduce the single-step assembly error correction task,
which involves identifying and rectifying misassembled components.
To support research in this area,
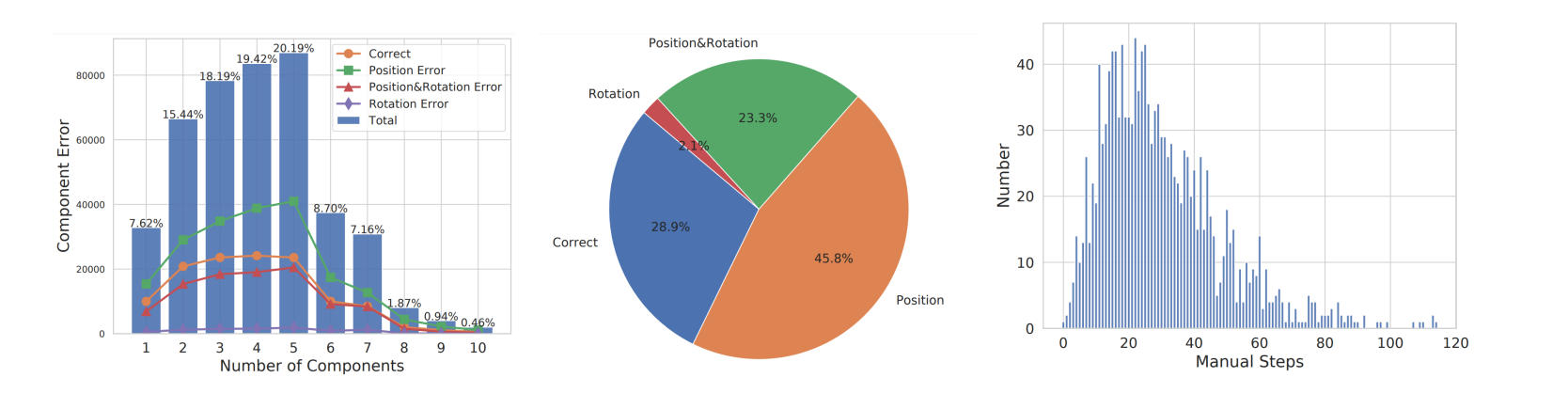
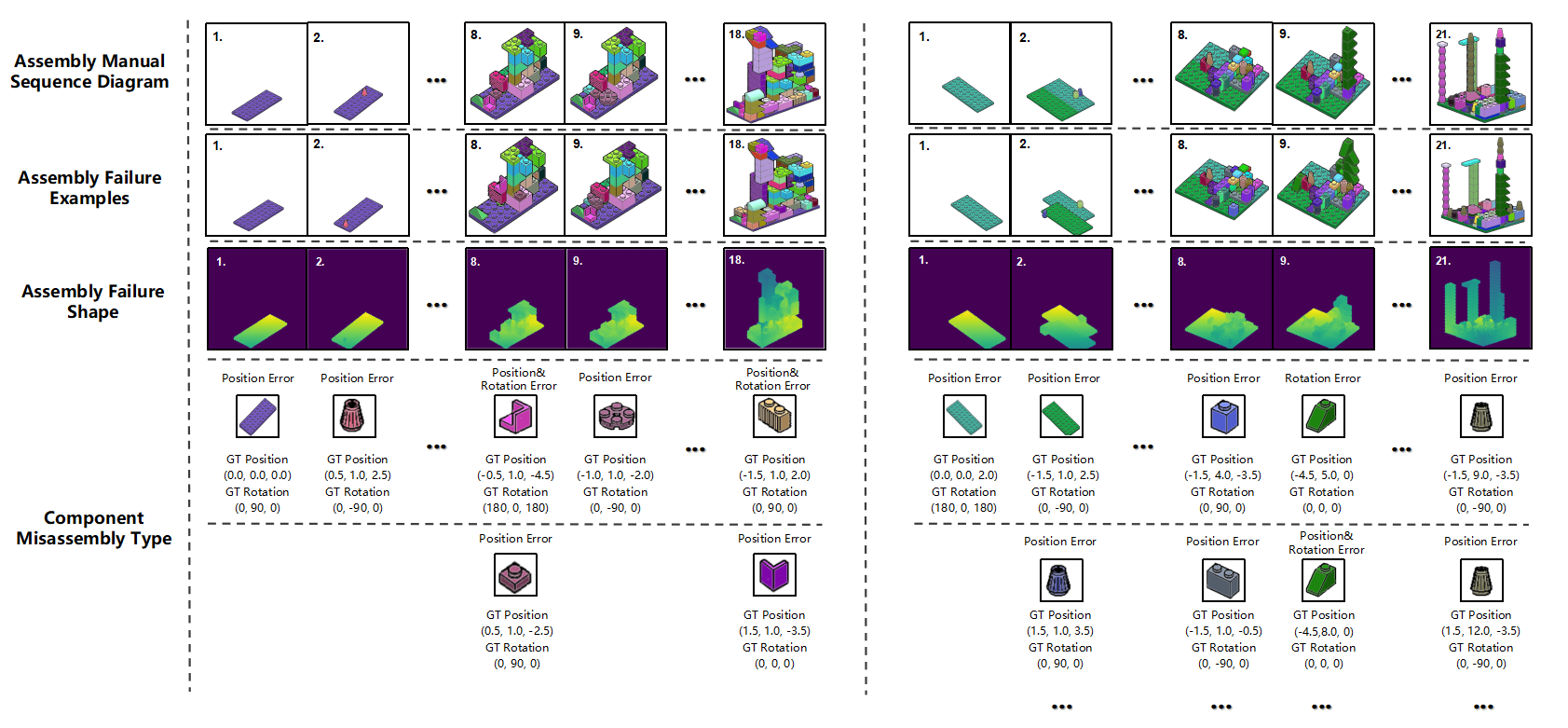
we present the LEGO Error Correction Assembly Dataset
(LEGO-ECA), comprising manual images for assembly steps
and instances of assembly failures. Additionally, we propose
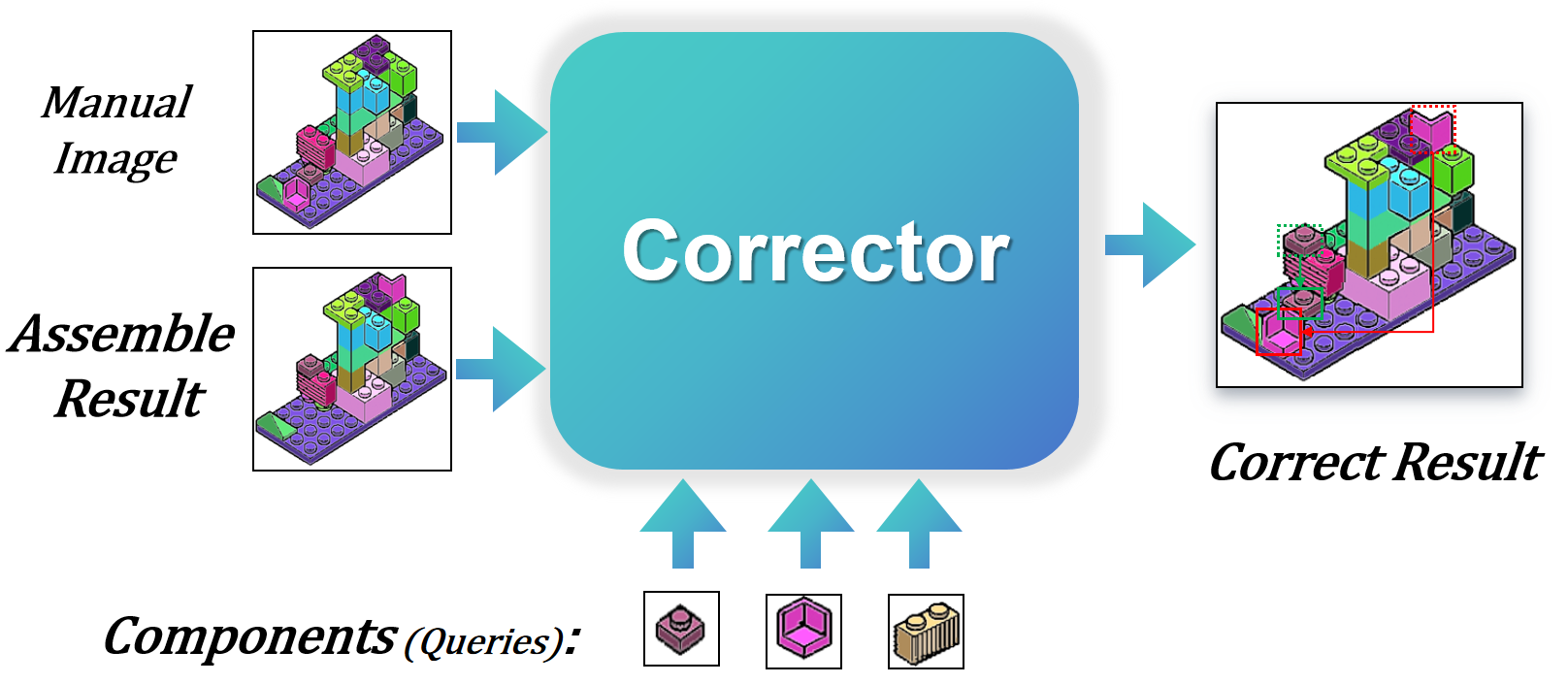
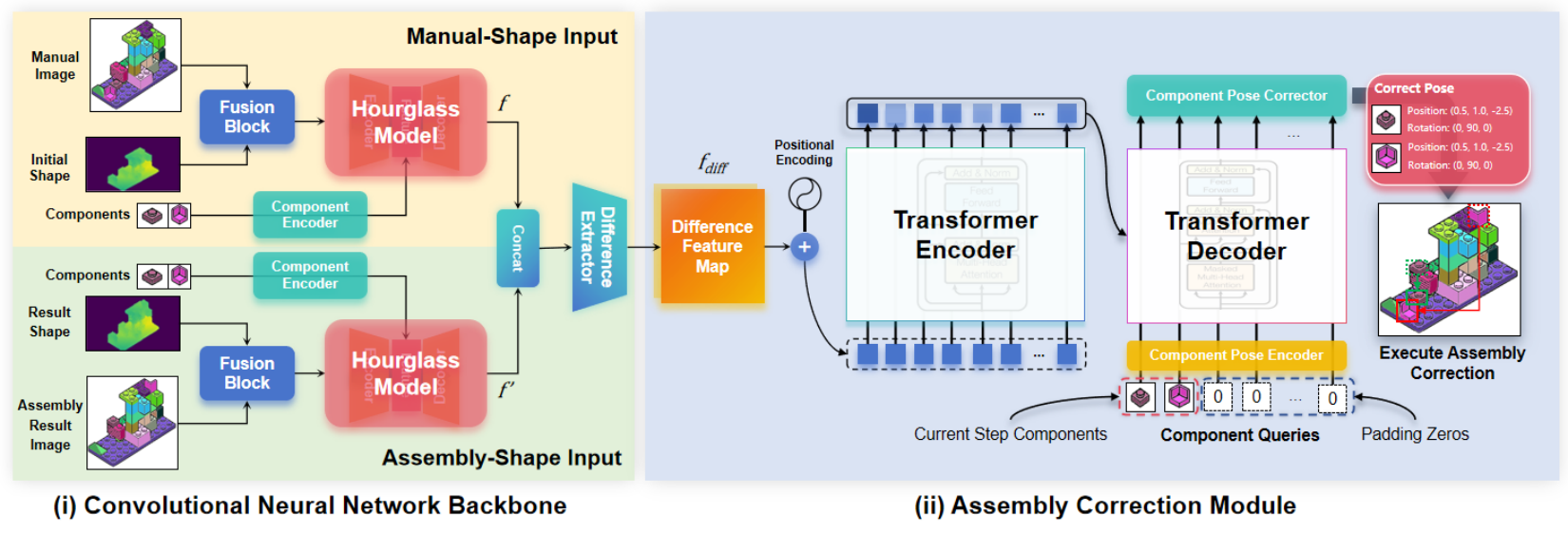
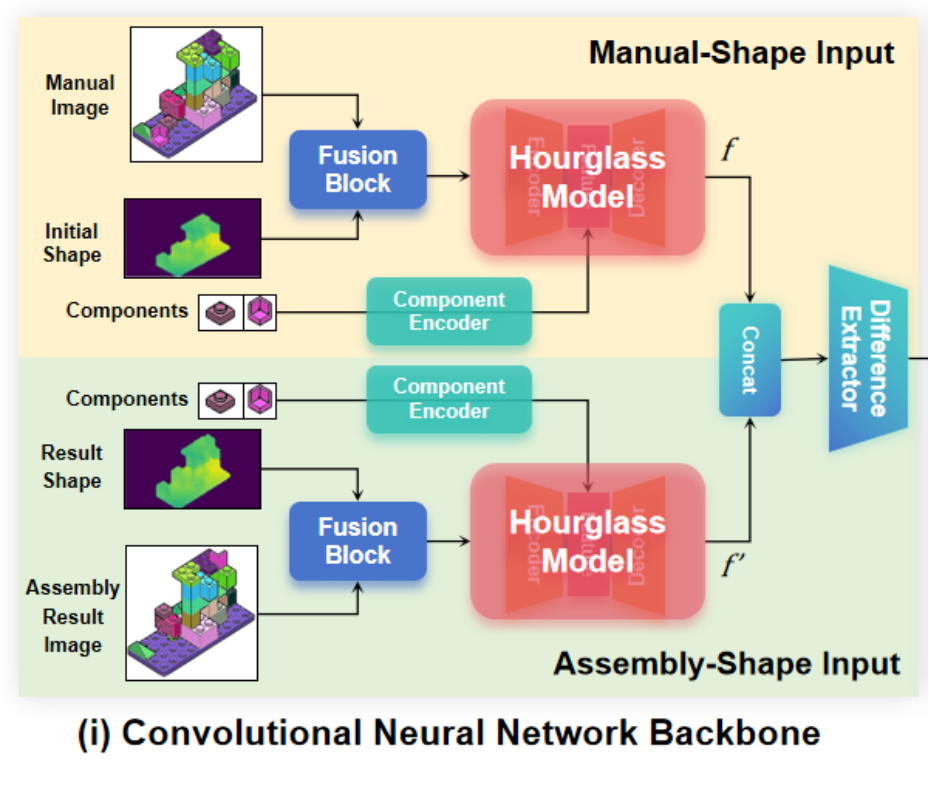
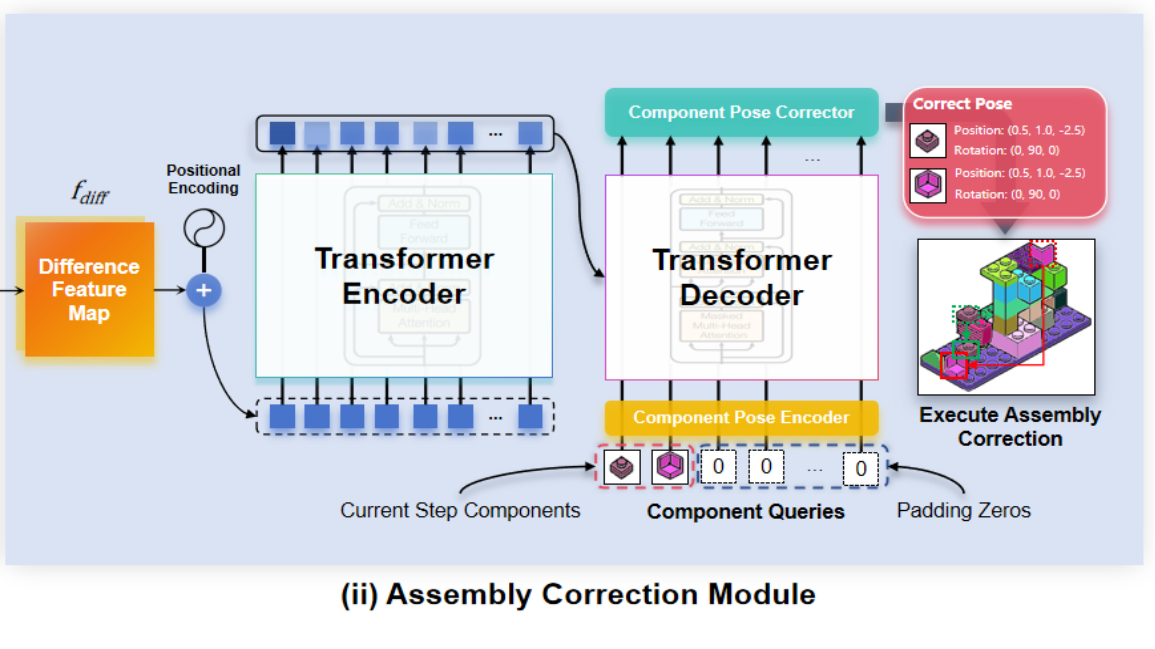
the Self-Correct Assembly Network (SCANet), a novel method
to address this task. SCANet treats assembled components
as queries, determining their correctness in manual images
and providing corrections when necessary. Finally, we utilize
SCANet to correct the assembly results of MEPNet. Experimental results demonstrate that SCANet can identify and correct
MEPNet’s misassembled results, significantly improving the
correctness of assembly.